I. Համակարգի ակնարկ
1. Նախագծի նախապատմություն
Վերջին տարիներին մայրուղիներով բեռնատար մեքենաների անօրինական տեղափոխումը լուրջ խնդիր է դարձել, որը վտանգում է երկրի ճանապարհային երթևեկության անվտանգությունը։ Այն գերբեռնում է մայրուղիներն ու կամուրջները, զգալիորեն կրճատելով ճանապարհների և կամուրջների ծառայության ժամկետը, միաժամանակ զգալիորեն նվազում է տրանսպորտային միջոցների անվտանգության գործոնը, ինչը անընդհատ առաջացնում է ճանապարհատրանսպորտային պատահարներ, ինչպես նաև հեշտ է առաջացնել երթևեկության գերբեռնվածություն և շրջակա միջավայրի աղտոտում։
Երկրի բոլոր մակարդակների կառավարությունները անընդհատ մեծացրել են իրենց ջանքերը՝ մայրուղային տրանսպորտային միջոցների գերբեռնված տեղափոխումը վերահսկելու համար և հասել են կարևոր փուլային արդյունքների: Այնուամենայնիվ, բարդ սոցիալական և տնտեսական գործոնների պատճառով, ազգային գերբեռնվածության հայտնաբերման իրավիճակը դեռևս շատ լուրջ է, և վերականգնման թաքնված վտանգները չեն վերացվել. կառավարման արդյունքների համախմբումը և գերբեռնվածության հայտնաբերման աշխատանքների շարունակական խթանումը դեռևս մեծ ճնշման տակ է: Հետևաբար, տրանսպորտային միջոցների գերբեռնված տրանսպորտի կառավարումը երկարաժամկետ և ամենօրյա աշխատանք է, որը պետք է շարունակվի: Կարևոր է գերբեռնված աշխատանքի կառավարումը ներառել երկարաժամկետ մեխանիզմի մեջ: Այն նաև իրավականորեն զսպող դեր է խաղում գերբեռնված տրանսպորտային միջոցների համար և կարող է նաև ընդլայնել իր գործառույթները՝ այն դարձնելով ճանապարհային տեսչություն, պայքար մղելով անօրինական տրանսպորտային գործողությունների պատահական մտածելակերպի դեմ, և ժամանակին վերահսկել և վերացնել տարբեր անօրինական տրանսպորտային գործողությունները, ներառյալ գերբեռնված տրանսպորտը:
2. Կշռման համակարգի ներածություն
Ստատիկ բեռնատարի կշեռքի կշռման սկզբունքն այն է, որ բոլոր տրանսպորտային միջոցները կայանվեն կշռման հարթակի վրա՝ ամբողջ տրանսպորտային միջոցը կշռելու համար: Այն ունի բարձր կշռման ճշգրտություն և հստակ ազգային չափանիշներ: Այնուամենայնիվ, ավանդական բեռնատարի կշեռքը կարող է չափել միայն ամբողջ տրանսպորտային միջոցի քաշը, բայց ոչ առանցքի քաշը: Այն կարող է գնահատել, թե արդյոք ամբողջ տրանսպորտային միջոցը գերբեռնված է, բայց չի կարող գնահատել, թե արդյոք առանցքի քաշը գերբեռնված է: Այն չի կարող բավարարել ճանապարհային կառավարման վարչության պահանջները՝ գերբեռնված տրանսպորտը կառավարելու նպատակին հասնելու համար:
Այս ծրագիրը համատեղում է մեր ընկերության տարիների փորձը գերբեռնվածության հայտնաբերման սարքավորումների նախագծման և արտադրության և դրանց իրական կիրառման ոլորտում երկրի տարբեր շրջաններում, ուշադիր ուսումնասիրում է շուկայում առկա տարբեր գերբեռնվածության հայտնաբերման սարքավորումների օգտագործումը և համապարփակ կերպով հաշվի է առնում մայրուղիների կառավարման բաժինների հատուկ կարիքները գերբեռնված տրանսպորտային միջոցների կառավարման համար: Այն ընդունում է առաջադեմ տեխնոլոգիաներ և եզակի դիզայնի գաղափարներ՝ դինամիկ, բարձր ճշգրտությամբ տրանսպորտային միջոցի քաշի և առանցքի տեսակի հայտնաբերման համակարգ մշակելու համար: Այն կարող է կշռել ինչպես առանցքի քաշը, այնպես էլ ընդհանուր քաշը, և կարող է տարբերակել առանցքի տեսակը: Առանցքի քաշի ճշգրտությունը նույնպես կարող է զգալիորեն բարելավվել:
2. Գերծանրաբեռնվածության և գերծանրաբեռնվածության համակարգի կազմը
1. Համակարգի առանձնահատկությունները
Այն կարող է կշռել ցածր արագությամբ անցնող տրանսպորտային միջոցները և ավտոմատ կերպով որոշել, թե արդյոք մեքենայի քաշը, թե առանցքի քաշը գերծանրաբեռնված է։
Այն կարող է հայտնաբերել առանցքների քանակը, առանցքների խումբը, առանցքների քաշը և տրանսպորտային միջոցի քաշը։
Այն կարող է կազմել տրանսպորտային միջոցի կշռման ամբողջական տեղեկատվություն, ներառյալ առանցքի տեսակը, առանցքի քաշը, առանցքի խումբը և ընդհանուր քաշը։
Այն կարող է կշռման տեղեկատվությունը փոխանցել համակարգչին տվյալների ինտերֆեյսի միջոցով։
Համակարգի հիմնական մասը ներառում է հասուն և հուսալի սարքավորումներ, որոնցից բոլորն էլ մոդուլային դիզայն ունեն, հեշտ են սպասարկվում և ընդլայնվում՝ ապահովելով համակարգի բարձր հուսալիությունը։
Համակարգի ծրագրային ապահովումը հասուն է, բարձր հուսալիությամբ, տվյալները ամբողջական և արդյունավետ են, և դրանք կարող են լիովին փոխանակվել՝ արդյունավետորեն բարելավելով աշխատանքի արդյունավետությունը և առավելագույնս վերացնելով կառավարման տարբեր բացթողումները։
2. Համակարգային գործընթաց
Բեռնատարը մտցվում է գերբեռնվածության կայանի կշռման գոտի, և համարանիշի ճանաչման համակարգը նույնականացնում է համարանիշը։
Անվադողի (առանցքի) նույնականացուցիչը տարբերակում է առանցքների քանակը, և տրանսպորտային միջոցի կշռման համակարգը սկսում է կշռել, որոշել առանցքների խումբը և հաշվարկել առանցքի քաշը։
Երբ բոլոր տրանսպորտային միջոցներն անցնում են տրանսպորտային միջոցների բաժանարարով և մտնում կշռման հարթակ, և կշեռքը գտնվում է համեմատաբար հավասարակշռված վիճակում, գրանցվում է տրանսպորտային միջոցի ընդհանուր քաշը և ստացվում է առանցքային քաշը։
Կշռման համակարգը կշռման մասին տեղեկատվությունը (համարանիշը, առանցքների քանակը, առանցքի քաշը, տրանսպորտային միջոցի ընդհանուր քաշը և այլն) ուղարկում է հայտնաբերման համակարգչին: Համակարգիչը որոշում է, թե արդյոք այն գերազանցում է սահմանը, և էկրանին ցուցադրում է հայտնաբերման տեղեկատվությունը, ինչպիսիք են տրանսպորտային միջոցի քաշը, սահմանից գերազանցումը և սահմանից գերազանցման մակարդակը:
Տրանսպորտային միջոցի կողմից համապատասխան գործողություններն ավարտելուց հետո, տրանսպորտային միջոցների ուղեկցող անձնակազմը բաց է թողնում ոչ սահմանափակված տրանսպորտային միջոցները՝ հայտնաբերման տարածքից դուրս գալու համար՝ համաձայն էկրանին տրված տեղեկատվության, ուղղորդում է գերազանցված սահմանափակված տրանսպորտային միջոցներին մուտք գործել կայանի տարածք՝ մշակման համար, տպում է գերազանցված տրանսպորտային միջոցի ստուգման ձևը և կատարում համապատասխան լիցքավորման գործողություններ։
3. Համակարգի կազմը և դասավորության պլանը
3.1 Համակարգի կազմը
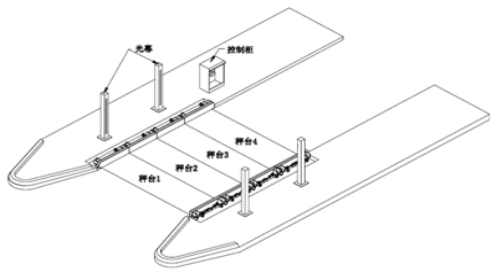
Գերծանրաբեռնվածության և գերբեռնվածության համակարգը բաղկացած է ZDG չորս սեղանից բաղկացած դինամիկ առանցքային կշեռքից, կառավարման գործիքից, ինֆրակարմիր տրանսպորտային միջոցի բաժանիչից, կշռման հարթակի անիվի առանցքային նույնականացուցիչից, կառավարման պահարանից (լրացուցիչ սարքավորումներ՝ համարանիշի ճանաչման համակարգ, LED մեծ էկրանի ցուցադրման համակարգ, ձայնային հուշումների համակարգ, տրանսպորտային միջոցի ուղղորդման համակարգ, արդյունաբերական համակարգիչ, տոմսերի տպիչ, UPS անխափան սնուցման աղբյուր, գերծանրաբեռնվածության և գերբեռնվածության հայտնաբերման համակարգի ծրագրային ապահովում, մոնիթորինգի համակարգ) և այլ պարագաներից և մալուխներից։
3.2 Համակարգի դասավորության դիագրամը, ինչպես ցույց է տրված.
Աշխատանքային հոսք՝
1) Տրանսպորտային միջոցները հաջորդաբար մտնում են գոտի՝ պահպանելով անվտանգ հեռավորություն, ակտիվացնելով ինֆրակարմիր տրանսպորտային միջոցների բաժանիչը։
2) Տրանսպորտային միջոցի յուրաքանչյուր առանցք անցնում է բազմամակարդակ կշռման հարթակի միջով։
3) Ցուցադրման կարգավորիչը մշակում է կշռման հարթակի սենսորից ստացված կշռման ազդանշանը և անիվի սենսորային ազդանշանը, բաժանում է առանցքը տրամաբանական պայմանների համաձայն և արդյունավետորեն կարգավորում է հատուկ իրավիճակները։
4) Տրանսպորտային միջոցի հետևի մասը դուրս է գալիս բազմամակարդակ կշռման հարթակից և ինֆրակարմիր տրանսպորտային միջոցի բաժանիչից։
5) Էկրանի կառավարիչը համապարփակ կերպով գնահատում է տրանսպորտային միջոցի ավարտի ազդանշանը՝ հիմնվելով ինֆրակարմիր տրանսպորտային միջոցի բաժանիչի կողմից հայտնաբերված խցանման ազդանշանի և կշռման սենսորի կողմից ստացված կշռման ազդանշանի վրա։
6) Էկրանի կարգավորիչը մշակում է վերը նշված տրանսպորտային միջոցի կշռման հարթակով անցնելիս ստացված կշռման ազդանշանը։
7) Էկրանի կառավարիչը ներկայացնում է ամբողջ տրանսպորտային միջոցի ամբողջական կշռման տեղեկատվությունը, և ամբողջական կշռման տեղեկատվությունը ներառում է տրանսպորտային միջոցի արագությունը, առանցքի տեսակը, առանցքի քաշը, առանցքի խմբի քաշը, ընդհանուր քաշը և այլն։
8) Ավարտեք մեկ տրանսպորտային միջոցի կշռման գործընթացը և սպասեք հաջորդ տրանսպորտային միջոցի կշռմանը
9) Աշխատանքային ողջ գործընթացի ընթացքում համակարգը ավտոմատ կերպով կարգավորում է տարբեր հատուկ իրավիճակներ, ինչպիսիք են լրիվ մուտքը և լրիվ ելքը, կրկնակի մուտքն ու ելքը, ինչպես նաև կշռման հարթակի վրա երկար մնալը։
Համակարգը կարող է ավտոմատ կերպով և արդյունավետորեն կարգավորել հետևյալ տրանսպորտային միջոցի իրավիճակը, և հետևյալ տրանսպորտային միջոցի կշռումը որևէ ազդեցություն չունի տվյալների ճշգրտության վրա։

Հրապարակման ժամանակը. Փետրվարի 20-2025